ADVANCED CONTROL
WELL INTERVENTION
System Description
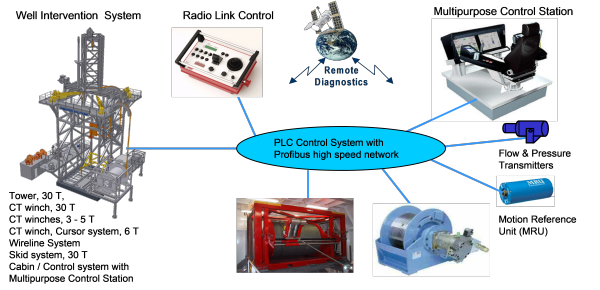
Our Winch Control System is developed as a generic and flexible solution for winch and crane applications. It fits small winch and crane applications as well as complex Module handling and Well intervention systems.
The lifting appliance may include a complete tower structure or stand alone gears like main lift winch, guide wire winch, cursor winch, wire-line winch, HPU, skid system, A-frame, etc.
System Philosophy
The general design for the control system is built around a flexible & modular-based PLC system with various selectable operator interfaces to fit the actual environment.
Our System allows for integration of various lifting appliances and will be fit to meet the customer demands and even integrate other systems such as wire line & coil tubing system, CCTV etc. in the operator screen. The system is designed entirely from standard “off the shelves†certified components.
The foundation software design philosophy for winches is based on functions that easily can be adapted to several applications.
The control system is built around a Simatic S7 Controller, which is an acknowledged industry standard for machine control, and a technology where AC personnel have extensive experience in design, implementation and maintenance.
Supervisory Controller
A programmable logic controller (PLC) is used as the master controller for the system. Local or remote analog and digital input/output devices connect directly to the PLC for operator station controls and system status monitoring.
The drives communicate with the PLC over a high speed Profibus industrial network. The network connection allows the PLC to access the capability of the drive functions for control and diagnostics. Multiple drives are simply added to the same network as required.
The software is developed by utilizing Simatic programming tool and is designed to make it simple to operate and maintain the system in the field.
The PLC program is stored on removable Flash EPROM media. Software updates and hardware replacements are possible with a simple plug-in module.
Operator Interface
To operate the system there are different options available: Alphanumeric, Radio Controls, Local Operator Desk
The Operator interface has the following features:
- Simple Control Interface with Joysticks & Push Buttons
- Multiple Control Station capability
- Display of Alarm & Status conditions
- Logging of Alarms and Events
- Display of line Tension, Payout and Speed
- Graphics display
- Interface to other systems on Ethernet IP
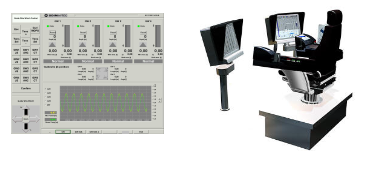
Multiple opertator stations
The system is designed to support multiple operator stations. Since safety is paramount in any control strategy there is a restriction on only one station being allowed to issue commands to control the winch at any time. The operator can take command from any connected station.
Flashing or steady illuminated indicators display the active or standby status of each station. Emergency stop pushbuttons and status indicators are active on all stations at all times.
Multipurpose Control station with
dual screen solution
Control Interface
The design of the user interface gives smooth precise control with the minimum of operator intervention. The winch pay in/out is commanded through a rugged rated joystick with neutral position mechanical and electrical interlock.
The control system is designed to be interfaced to an over boarding A-Frame or to operate in a tower / derrick structure. Sensors for position limits and load monitoring are connected to provide launch and recovery sequence interlocks.
A key operated switch is provided for maintenance override. Flashing indicators and visual & audible alarms prompt the operator when sequence interlocks are violated.
Remote Access & Data transfers
The development system also offers remote access capability where an access link to a remote location can be established. This allows diagnostics, software maintenance and downloads to be carried out without a specialist engineer being required on site.
Data transfers to control room on-shore can easily be set up and routed via Ethernet.
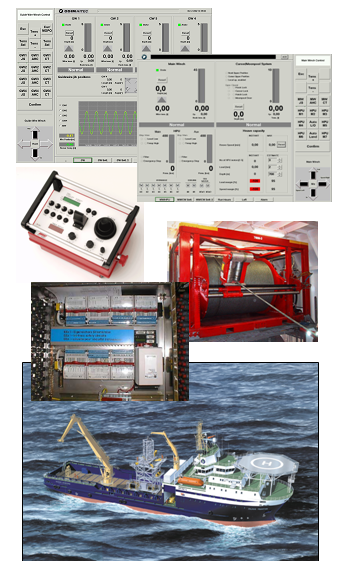

Enclosures & Hardware
Control enclosure for the winch and associated equipment are combined in one rugged construction for open deck use or in IP 56 panels for location at in-house environment, ie control -or electrical room.
Remote I/O enclosures are installed on the gears to enable FAT testing at manufacturer workshop and achieve efficient hook-up on the vessel. I/O nodes are connected to the PLC controller via a fiber optic, high speed, Profibus ring communication.
The selection of the hardware are driven by the requirement to have a complete solution using high quality equipment that could be integrated, maintained and operated anywhere in the world.
Drives - Electrical & Hydraulic
Winch Control system is designed as a generic system, which can be used in conjunction with hydraulic as well as electrical powered winches. The application software is structured in a flexible way allowing parameter settings to configure various types of gears from different manufacturer.
Heave Compensation
A motion reference unit MRU) can be installed to measure the heave of the vessel. A speed reference signal is derived that can be input directly to the control system speed controller as a controlling input. The winch then also responds to the speed of the vessel heave and effectively reduces the effects of vessel dynamics on the submerged load.
Precedent of a Project
- Existing tower construction, modified to fit specifications.
- Skips crane used as main lift winch.
- 4 ea new CT (Constant Tension) Winches with HPU
- New PLC S7 Control System to interface with HPU and 4 ea winches.
- Operator interface via portable radio link panel and local control / alphanumeric display installed in a stainless steel rugged deck stand
- All winches to operate in normal lifting mode, Active Heave Compensation Mode and Constant Tension Mode.
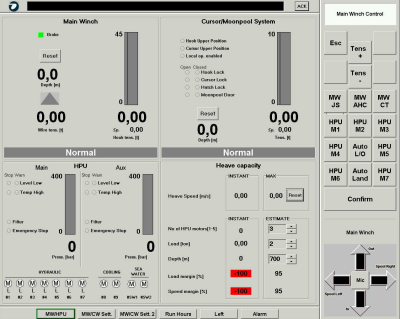
Well Intervention System
All Winches are equipped for normal lifting operations, Active Heave Compensation and Constant Tension with low hysteresis.
Operator can pre-set various auto functions, like Auto Lift Off, Auto Landing, Pull Force Limitation and Speed Limitation as well as other functions as required.
MRU, Load Cell, Position Encoder, and Pressure Sensors give feedback in to PLC. Software algorithmic controls the winch to accurate perform AHC and CT to minimize the movement of the wire relative to the seabed and wellhead.
Operator control shall be from single or dual Multipurpose Control Station.